IoT-Based Robotic Systems Integrating Artificial Intelligence for Sustainable Crop Protection in Agriculture
Authors :
S.Pugazhenthi and S.Sasikumar
Address :
1Department of Computer Science, Sri Moogambigai Arts and Science College, Mallupatti, Dharmapuri
2Department of CA, karpagam Academy of Higher Education, Echanari post, Coimbatore
Abstract :
Advancements in technology, including the Internet of Things (IoT) and Artificial Intelligence (AI), greatly impact agriculture. The study investigates the statistical applications of AI-driven robotic devices based on the IoT as a basic emphasis. Using manual effort and chemical fertilizers, traditional farming can be highly attributed to inefficiency, health problems and environmental effects. The paper proposes an AgriBotIQ, a revolutionary platform that uses robotics based on IoT to monitor and analyse with accurate participation in plant management. Autonomous robots can collect information based on plants and their habitats by using imaging devices and sensors like soil moisture, humidity, temperature, and many others. Machine learning (ML) algorithms search the database for anomaly detection, threats, and crop trends. To identify the crops that are diseased or healthy, ML is integrated with computer vision. The suggested AgriBotIQ also eliminated weeds, boosting the output by neglecting unneeded waste and chemicals. The emerging IoTs have allowed better remote plant monitoring in more versatile and précised. Overall productivity and protection of crops are possible by statistical analysis and real-time notifications of the proactive decision-making outcomes. By combining IoT and AI, the future agricultural crop security will improve greatly.
Keywords :
Artificial intelligence, Robotics, Internet of Things, Remote control, Smart sensors, Crop Protection, Precision farming.
1.Introduction
The UN projects that by 2050, the world's population will have risen to 9.7 billion, calling for a 70% increase in food production. The way forward for businesses in this situation is to find ways to boost agricultural output while reducing the negative effects of conventional farming on the environment. Overuse of chemical pesticides and fertilisers has eroded soil, contaminated water sources, and harmed the well-being of humans and animals. The study wants new ideas to boost agricultural productivity in a sustainable and environmentally friendly way [1]. Maximum production, optimal decision-making, effective use of resources, and environmental sustainability are all guaranteed by "smart farming" thanks to objective data obtained by sensors. The cornerstone of sustainable agriculture will be methodologies grounded in robotic solutions and artificial intelligence [2]. Improved decision-making is possible with the use of drones and satellites for remote sensing by closely monitoring soil health, plant energy, and various other environmental parameters [3]. Artificial Neural Networks, ANNs, and other contemporary AI problemsolving tools enable us to address unique agricultural issues. For farms, "smart farming" means implementing state-of-the-art technology like AI and the IoT, which completely changes how things are done [4]. The Internet of Things (IoT), cloud computing, and machine learning allow for all-encompassing environmental monitoring. By categorizing data, researchers may choose the optimal circumstances for the growth of different types of crops [5].
By monitoring several agricultural metrics, the Indian-based Fasal IoT platform assists farmers in making more informed decisions regarding their operations. An AI-powered engine powers the site. The application of AI and data analytics enables farmers to attain future crop control and optimum productivity [6]. It takes effort and time to attend to all the requisite logistics, such as collecting, sorting, shipping, and marketing crops. Better agro-business practices can be achieved using smart agriculture technologies to address and alleviate these challenges [7]. Precision farming is one sustainable option; it increases output with precisely determined inputs while decreasing the usage of inputs that could be damaging to the environment, such as pesticides [8]. To increase productivity, decrease input costs, and improve crop yields and quality per worker, a new method called "smart farming" is being implemented [9]. The study employs cutting-edge ICT techniques such as the Internet of Things or IoT global positioning systems (GPS), sensors, robotics, drones, actuators, precision machinery, and data analytics to ascertain the farmers' needs and put suitable solutions into action [10].
The grain yield mapping framework includes sensors for moisture, grain volume, GPS (global positioning system) antenna and receiver, and travel speed. Crop yield monitoring uses grain flow sensors, which use mass and volume flow methods. A yield sensor measures the stream rate every one to two seconds during collecting or the harvested amount per unit area [11]. With the help of autonomous robots, weeding becomes much more efficient, and less pesticide is used. Drones can be used to successfully spray pesticides and monitor crops without requiring an excessive amount of human labour. Crop readiness assessment and forecasting yields are useful tools to analyze and forecast the quantity of high-quality harvest available for sale [12]. Key contributions of the study include,
The remaining part of the study is organized as follows: Section 2 describes the various existing studies related to machine learning, IoT and AI technologies for smart farming; Section 3 describes the proposed AgriBotIQ approach of how it works on precision agriculture; Results and discussion based on improvement in the smart farming is given in section4, and the study concludes in section 5 with their future works.
2. Related work
Mesías-Ruiz et al. [13] proposed the importance of AI, ML, and other developing technologies in protecting crops from the effects of climate change and meeting the increasing need for food. The study showed how crop protection has progressed from its earliest forms to its current state and how ML algorithms have helped with precision. Although other creative methods may be disregarded, the article discussed emerging technologies such as intelligent sensors and AI-based robots for the next generation of crop security systems. Shahab et al. [14] proposed smart farming powered by the IoT and using AI and ML algorithms to help improve agricultural productivity sustainably, which in turn helps achieve the Sustainable development goals (SDGs) set out by the United Nations. The article focused on the most recent findings in smart farming, which emphasizes the capabilities of machines and the application of UAVs and robots in farming. It also stressed the significance of wireless communication technologies in managing sustainable agriculture.
Ali et al. [15] outlined state-of-the-art IoT and smart farming techniques to maintain sustainably produced crops in response to critical global challenges like climate change and rising food demand. These technologies made agriculture more efficient, productive, and cost-effective by keeping tabs on crops, controlling resources, and forecasting yields. Although the study provided potential benefits like reduced energy use and improved illness management, it can fail to resolve issues like high costs and a lack of technical knowledge. Javaid et al. [16] proposed that many agricultural jobs, such as crop cultivation and soil analysis, have become much easier to accomplish with recent breakthroughs in AI. With the help of AI, farmers can choose the best seeds, plant them at the right times, and apply nutrients so that their crops are ready for market with minimal waste of resources. Health monitoring systems are one method that allows farmers to see their crops in action right now. However, obstacles such as price and lack of accessibility to technology still stand in the way of broad AI implementation in farming.
Using a full-scale prototype made with IoT and 3D printing technologies, Catota et al. [17] proposed a solution to the issue of inefficient agricultural resource management. Incorporating 3D printing for sowing and the IoT Arduino Cloud for monitoring showcases effective cultivation by providing real-time visualization of factors. Despite showing efficient cultivation, limitations may include problems with scalability, cost-effectiveness, and the complexity of combining different systems. Riskiawan et al. [18] presented an IoT, AI, and LSTM-integrated automated greenhouse environmental control system. Effective climate monitoring and management is available. However, there may be drawbacks, such as difficult system integration, problems with scaling, and high costs. Some people doubt the system's usefulness in real-world scenarios because of its dependence on LSTM training data and the ongoing requirement to gather data.
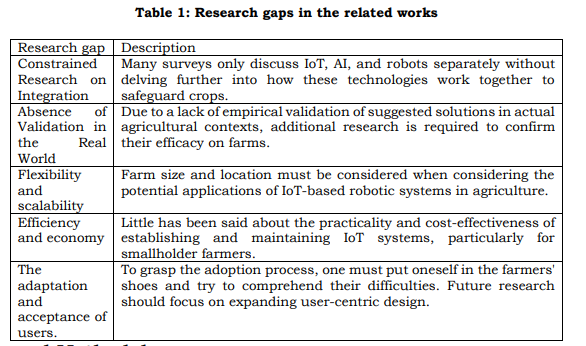
Parasuraman et al. [19] studied cutting-edge smart agriculture and Internet of Things (IoT) technologies to combat pesticide overuse and agricultural diseases. In addition to potential problems with efficiency and scalability, integrating different types of automation might be difficult. To be prepared for actual use, the suggested IoT plant recognition and watering design needs more validation and testing. The authors of the work by Sheron et al. [20] proposed a technique for improving robotic object identification accuracy that they named projection-dependent input handling (PDIP). Despite their low error rate and excellent recognition ratio, there are substantial limitations due to the difficulty of PDIP implementation and possible difficulties in real-world application. Greater testing and validation of the method's reliability and adaptability are required in several settings. Agricultural crops can only be protected from pests and illnesses if researchers create more realistic, efficient, and long-lasting robotic systems based on the Internet of Things. Table 1 summarizes pertinent research possibilities.
3. Proposed Methodology
This device is groundbreaking in the agricultural field because AgriBotIQ solves all the problems farmers face today. AI and the ubiquitous Internet of Things allow AgriBotIQ to facilitate precision agriculture by providing real-time analysis, tracking, and management of crops. It can benefit many fields, such as sustainable agriculture, remote monitoring, pest identification, and data-driven decision-making. By helping farmers to reduce the use of toxic pesticides and improve the utilization of current resources, AgriBotIQ offers a significant effect in the battle against sustainable agriculture. Farmers can find important information about their land, crops, and surroundings with this instrument. This data will allow them to make better judgments and run their business more efficiently. And when it comes to AI, IoT, and robotics, AgriBotIQ is way out in front, paving the way for all sorts of exciting new developments in the farming industry. Contemporary farmers concerned about their influence on the environment, efficiency, and productivity should purchase an AgriBotIQ.
3.1 AgriBotIQ system architecture
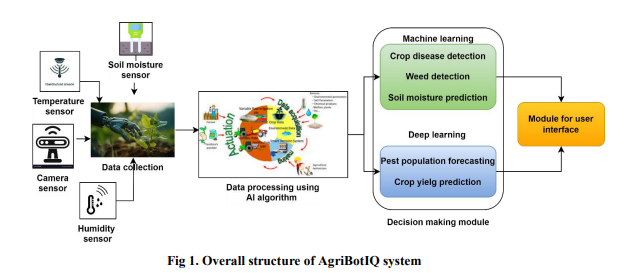
The aforementioned method for crop protection is based on substantial study; the goal is to provide a persuasive and practical answer. The proposed layout uses state-of-the-art technology and various data-gathering techniques, as seen in Figure 1. The IoT is the starting point of the digital revolution for farming with respect to weather monitoring and irrigation. Soil temperature, moisture, and humidity are the three variables that these sensors measure in real-time. In addition, AI techniques are combined with visual signs and patterns to detect plant diseases early on, allowing for faster treatment. As a component of production evolution, studying the development and change of crops is crucial. The many components of the AI and robotics-based crop protection system work together to improve farming:
Data collection module: The system uses various sources to generate insights, including weather predictions, soil sensors, satellite imagery, and digital bug traps. With this much data, we can foretell when weeds will sprout, pests will attack, diseases will spread, and even the weather. This module aims to teach students how to create and understand machine learning models so that they can programmatically analyse data and get valuable insights. The technology deciphers the results of ML models and delivers actionable insights to aid in decision-making.
The decision-making module uses AI technologies to assess the collected data and select optimal crop protection strategies. Several aspects are taken into account when assessing the efficacy of pesticide applications. These include the crop type, its developmental stage, the severity of the insect, weed, and disease, and underlying ecological and risk factors. Furthermore, we consider possible increases in pesticide resistance and legislative limitations.
Autonomous robots with sensors and cameras can use this technology in their robotic modules. We can create the most efficient crop protection processes conceivable by teaching these robots to detect and eradicate pests, diseases, and weeds using AI algorithms. The monitoring module, which employs AI to make necessary adjustments in real-time, can track crop protection techniques' effectiveness. Maintaining this awareness guarantees peak performance and permits prompt actions whenever necessary.
The user interface module offers a user-friendly platform for stakeholders, including agricultural scientists, farmers, and others, to communicate with one another. Customers can enter data through this interface to tailor the results to their requirements. The system's recommendations and outcomes are displayed.AI-powered robotic crop protection devices provide more effective crop protection with less chemical input. The system provides data-driven suggestions for crop protection strategies to encourage sustainable agricultural practices and maximize crop yields.
If a graph G' and a set of traversals T create the same inspired traversal trind, the definitive option is the single T traversal that can reach G' trind with the allowed visited order of vertices.By limiting themselves to canonical possibilities, GPM algorithms eliminate wasteful computation by ensuring that no two exploration traversals end up at the same induced traversal. It is possible to transform canonical candidates into a distinct representation known as a canonical representative, or pattern, in this context. Canonical labeling is a common procedure in GPM methods for subgraph classification; it involves converting an induced traversal to its canonical representation.
3.2 AI-based crop protection
As mentioned above, the ant colony optimization (ACO) algorithm is one of the AI techniques that the AgriBotIQ software can employ. Optimization of routes and resource allocation are two examples of problems that can benefit from ACO's metaheuristic optimization method when combined with more conventional ML and DL techniques. In the subsequent AgriBotIQ cases, for instance, ACO may prove useful:
Given that AgriBotIQ may have to travel across fields to gather data or apply treatments in a farming context, enhancing its route-planning capabilities is crucial. ACO, which considers distance, terrain type, and obstructions, can help find the best routes for AgriBotIQ. By leaving pheromone trails along possible paths that the ant colony traverses, an ACO may direct AgriBotIQ to its most efficient channels.
As a result of scarce assets (time, energy, and pesticides), AgriBotIQ has to take every precaution to save its crops. In order to optimize resource allocation, ACO constantly assigns resources to tasks or places according to the way successfully they accomplish the targeted results. Monitoring pheromone trails generated by synthetic ants might help AgriBotIQ determine the optimal locations to sprinkle irrigation or pesticide.
The best crop protection may be provided by AgriBotIQ if it looks for pests, monitors the crop's circumstances, and applies remedies at preset intervals. Prioritize tasks according to the crop's stages of growth, the environment, and available labour. Apply ACO to find the best times and sequence to complete each task. According to ACO, AgriBotIQ can quickly adapt to new scenarios by constantly studying and changing pheromone traces linked to varied workforce schedules.
Protecting crop operations might be made more efficient and successful with the help of ACO, provided AgriBotIQ could optimize route strategy, resource allocation, and task scheduling. The behavior of the algorithm that determines the paths taken by the colonies of a plant protection robot will be examined during this study using the ant colony approach. Assume the ant's code identifier is 𝑎 (𝑎 = 1,2,3 … . . 𝑛) and the node it has traversed is 𝑡𝑎𝑏𝑢𝑎 (𝑎 = 1,2,3 … … 𝑛) for recording purposes. The ant colony's movements may update the 𝑡𝑎𝑏𝑢 table in real-time, helping it make informed judgments about what to do next. The pheromones concentration on the line between nodes 𝑖 and 𝑗 at time 𝑡 is 𝜏𝑖𝑗, given that m is the total population of ants and 𝑖𝑠𝑑𝑖𝑗 (𝑖,𝑗 = 0,1, … . 𝑚 − 1). Starting with a uniform pheromone concentration, the program randomly places the ants. The ant's chance of hopping from a single node to the next at any particular moment is 0:

In equation (1), out of all the variables, allowed 𝑎𝑙𝑙𝑜𝑤𝑒𝑑𝑎 = {𝑑 − 𝑡𝑎𝑏𝑢𝑎 } denotes all the walking nodes from which the ants can choose. D stands for the combination of nodes. 𝛼 Represents the information heuristic factor, and its determination primarily depends on the ants' ability to work together in a group. 𝛽 reflects the expectation heuristic factor. 𝜂𝑖𝑗 Denotes the heuristic function, typically obtained through 𝜂𝑖𝑗 = 1 𝑐𝑖𝑗 . While ant path planning is underway, many pheromones are created. Therefore, to prevent information redundancy, updating the data after the planning process is finished is necessary. The intended data for route (𝑖,𝑗) is modified at the moment 𝑡 + 𝑛 to the following equation (2),

The volatile component of the pheromone is denoted by 𝜌 ∈ (0, 1), and the pheromone increment is denoted by∆𝜏𝑖𝑗(𝑡). Three distinct models can be derived from various methods of updating information. One way to represent the periant system model is given in below equation (3) as,

The model of an ant colony can be stated as the following equation (4) as,

The model of an ant colony can be stated as the following equation (4) as,The entire node distance is represented by 𝐿𝑎, and the pheromone is denoted by 𝑀. The model formula shows that the periant system revises the pheromone after each cycle, while the ant density and population systems update it after each step. Consequently, the periant system model is the most trustworthy. The plant protection robot's route planning follows a procedure comparable to an ACO by its fundamental premise. The first step in the process was positioning the plant protection robots in the optimal working position. The starting positions of n robots are denoted as𝑅1 (𝑥1, 𝑦1 ), 𝑅2 (𝑥2, 𝑦2 ), … , 𝑅𝑛(𝑥𝑛, 𝑦𝑛). The ant-algorithm approach used the starting point to calculate the planning path. As in equation (5).

where 𝜌 is the pheromone evaporation rate (0<𝜌<1) and ∆𝑇𝑖𝑗 is the amount of pheromone deposited. 𝑇𝑖𝑗(𝑡 + 1) Is the pheromone level, on the path between nodes 𝑖 and 𝑗.By running simulations, we can determine the optimal routes for our plant protection robots, as in equation (6).

Where 𝑚 is the possible paths and 𝑇1, 𝑇2, … , 𝑇𝑚 are their respective completion time. The initial plant protection robot can be directed to follow the second crop protection robot's path if it is the quickest, and the fastest of the m paths can be chosen as the best way to reach the target site. This directing path of the robots can be represented as in equation (7).

The plant security robot group's route planning is now a reality thanks to analogies.
3.3 IoT-based crop protection
Soil, microclimate, and especially crop sensing have all been enhanced by the Internet of Things (IoT), which has caused a sea change in crop tracking from a qualitative, experience-based process to a quantitative, data-driven one. Thanks to technologies built on the Internet of Things, farmers can now track the growth and health of their crops with pinpoint accuracy. The ability to monitor pest attacks and plant illnesses in real-time is another benefit it provides to farmers. Internet of Things (IoT) tagged sensors provide researchers and farmers with valuable real-time data for smart control of crop cultivation, irrigation, fertilizer application, and plant environment.
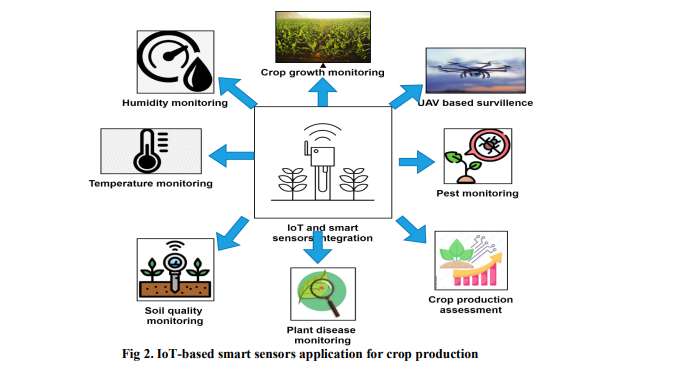
Network of Things (IoT) smart crop tracking systems rely on field-placed sensors to collect data on various environmental factors, such as soil moisture, temperature, humidity, and nutrient levels (shown in Fig.2). A common networking feature across these sensors allows real-time data transfer to a central cloud-based platform. After collecting data from these sensors, data analytics tools like machine learning are used to learn about the crop's growth rate, prospective yield, and overall health. This data can help farmers with irrigation, insect control, and harvesting decisions.
When administrators and farmers use wireless sensor technology, they may be notified when equipment fails and begin troubleshooting immediately. Implementing an automated repair tool can result in energy savings, faster data processing, and better actuation.
Modern agricultural practices are seeing the rise of unmanned aerial systems (UAS) connected to the Internet of Things (IoT). These systems enable farmers to capture aerial images of their fields in real time while streamlining data processing and storage. Several agricultural environmental characteristics can be effectively monitored using IoT-based systems. These include air temperatures, light levels, soil moisture, moisture, CO2 concentration, pH levels, and water usage for crop efficiency.
4. Results and discussion
The dataset details the methods used to cultivate crops for every region, season, and kind of soil [21]. The data encompasses a wide range of crops, including cotton, onions, potato, wheat, rice, ragi, groundnuts, sugar cane, and banana, as well as pertinent agricultural and environmental aspects. Important characteristics covered by the dataset include cropping period (kharif, rabi, or entirety year), place of residence (state), cultivated area, type of soil (e.g., alluvial ground, black soil), chemicals application rates (high, low, an average), soil pH, ambient temperature (low, high, average), use of fertiliser levels (low, high, an average), price of crops, and amounts of rainfall (high, low, average).
4.1 Recognition ratio
The accuracy rate, or recognition ratio, measures how well the AgriBotIQ system distinguishes between healthy, diseased, or nutrient-deficient plants. It is the proportion of plants that the system properly identified relative to the overall number of plants that were evaluated. Mathematically, recognition ratio (RR) is referred to as the following equation (8),

In equation (8), the total number of plants that the AgriBotIQ system accurately classified as healthy, diseased, or nutrient-deficient is called 𝑡𝑃 (True Positives). The number of plants that the AgriBotIQ system mistakenly deemed healthy, diseased, or nutrient-deficient is called 𝑓𝑃 (False Positives). The AgriBotIQ system must maximize true
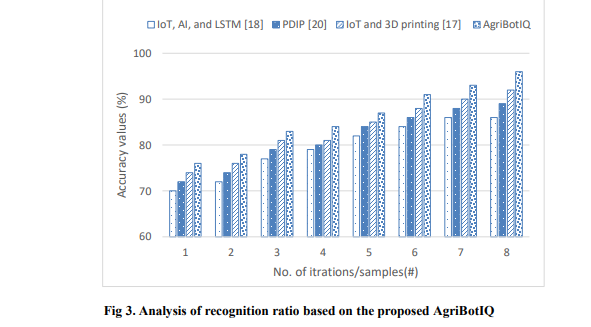
After calculating the recognition ratio, agricultural researchers and specialists can assess how the AgriBotIQ system predicts a user's nutritional and health status. A higher recognition ratio enhances the efficiency and lifespan of agricultural production (Fig. 3), proving the system's effectiveness and dependability in managing crops and protection.
4.2 Processing Time
The time indication illustrates the median length for the AgriBotIQ technology to analyze the data, find trends, and provide valuable insights. Very quickly and efficiently, the system completes the work measured by it. The method described in equation (9), which shows the sum of all execution times divided into the total of all observations, can be used to estimate the mean time for processing (AT) of the AgriBotIQ system:

Equation (9) shows that the total number of measurements is represented by 𝑡, and that each observation, indicated as𝐷𝑖 , requires iterations of the AgriBotIQ technology. Much work goes into each observation, including collecting data, cleaning it, identifying features, identifying trends, and producing insights. The data collected by the AgriBotIQ system may be examined via various methods such as artificial intelligence (AI), machine learning (ML), and others. To provide growers and agricultural professionals with timely insights, the AgriBotIQ platform may use efficient algorithms and appropriate system architecture to decrease the median processing time.
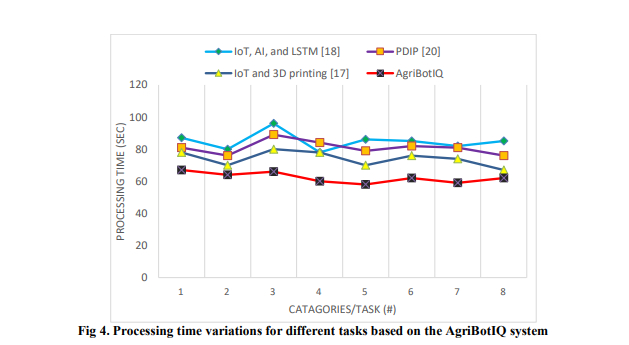
Reduced processing times improve cultivation and protection, as seen in Figure 4. This allows for quicker decision-making and reactions as crop conditions fluctuate. Scientists and engineers may be able to render AgriBotIQ smarter and more affordable if they monitor the median time measure closely. Improved farming methods that are friendlier to the environment will develop from that amount.
4.3 Error rate
An error rate provides a reliable indication of the number of times the AgriBotIQ system makes faults in crop analysis and monitoring. The manner in which the system works demonstrates whether it can distinguish between healthy, damaged, and nutritionally deficient crops. We may find the error rate (ER) by dividing the overall number of misidentifications by the total number of occurrences, as stated in Equation (10).

The acronym for the rate with which a specific state, like "healthy," "sick," or "deficient in nutrients," is correctly identified as "𝑡𝑃" in Equation (10). Can the state get the absence label correct some proportion of the time? True Negatives, abbreviated as𝑡𝑁, have that meaning. "Fake positives," or𝑓𝑃, is the frequency with which an incorrect diagnosis is produced when none exists. When a condition is mistakenly thought to be absent when it is present, this is called "False Negative," or𝑓𝑁. A false positive occurs when the AgriBotIQ technology mistakenly identifies abundant nutrients in healthy plants or excess nutrients in unhealthy plants. Such an occurrence occurs during the assessment and monitoring of crops. A false negative occurs when the system mistakenly labels a plant in good health as ill or lacking nutrients, even when the plant is perfectly OK.
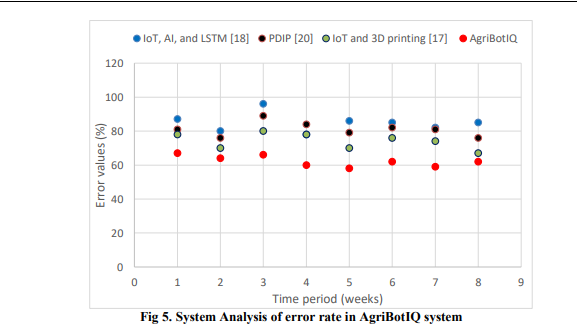
According to the study, the AgriBotIQ system may be evaluated for accurate and wrong identifications by determining the mistake rate. Fig. 5 shows that a system with reduced error rates is more trustworthy and accurate regarding crop tracking and assessing activities. Researchers and developers may want to examine and tweak the error rate parameter to improve the AgriBotIQ system. Based on this data, better techniques for crop preservation and management will be accessible.
5. Conclusion
Finally, AgriBotIQ demonstrates how internet-connected robotic devices powered by artificial intelligence (AI) could revolutionize farming by guaranteeing a consistent harvest. Smart sensors and AI allow AgriBotIQ to offer constant crop monitoring and precise care. There will be less need for chemical fertilizers and agricultural labor, and production can be increased with little harm to the environment thanks to this technique. As a group, farmers may use machine learning and actual time alarms to guarantee food safety for future generations. To make farming more profitable and less detrimental to the surroundings, research suggests that the IoT platform, automation, and AI could completely change the industry. Modern technology comes with a hefty price tag, and there are many more other factors to consider, such as the need for extensive technical support and laws regarding cyber security. Studying methods to solve agronomic problems in the future should center around building better AI algorithms, bringing costs down, and creating more trustworthy systems. The three sectors—government, industry, and academia—must collaborate to swiftly adopt these revolutionary technologies if the food industry remains healthy.
References :
[1]. Balaska, V., Adamidou, Z., Vryzas, Z., & Gasteratos, A. (2023). Sustainable crop protection via robotics and artificial intelligence solutions. Machines, 11(8), 774.
[2]. Haval, A. M., & Rahman, F. (2024). Application of machine learning techniques and the Internet of Things for smart, sustainable agriculture. In BIO Web of Conferences (Vol. 82, p. 05021). EDP Sciences.
[3]. Alkhafaji, M. A., Ramadan, G. M., Jaffer, Z., & Jasim, L. (2024). Revolutionizing Agriculture: The Impact of AI and IoT. In E3S Web of Conferences (Vol. 491, p. 01010). EDP Sciences
[4]. Hussein, A. H. A., Jabbar, K. A., Mohammed, A., & Al-Jawahry, H. M. (2024). AI and IoT in Farming: A Sustainable Approach. In E3S Web of Conferences (Vol. 491, p. 01020). EDP Sciences.
[5]. Elbasi, E., Mostafa, N., AlArnaout, Z., Zreikat, A. I., Cina, E., Varghese, G., ... & Zaki, C. (2022). Artificial intelligence technology in the agricultural sector: a systematic literature review. Ieee Access, 11, 171-202.
[6]. Priya, P., & Kaur, G. (2021). Smart Sensors for Smart Agriculture. In Artificial Intelligence and IoTBased Technologies for Sustainable Farming and Smart Agriculture (pp. 175-191). IGI Global.
[7]. AlZubi, A. A., & Galyna, K. (2023). Artificial intelligence and the Internet of Things for sustainable farming and smart agriculture. IEEE Access.
[8]. Subeesh, A., & Mehta, C. R. (2021). Automation and digitization of agriculture using artificial intelligence and internet of things. Artificial Intelligence in Agriculture, 5, 278-291.
[9]. Loganathan, G. B., Mahdi, Q. S., Saleh, I. H., & Othman, M. M. (2021, June). AGRIBOT: Energetic Agricultural Field Monitoring Robot Based on IoT Enabled Artificial Intelligence Logic. In International Conference on Emerging Technology Trends in Internet of Things and Computing (pp. 16-30). Cham: Springer International Publishing.
[10]. Dhanaraju, M., Chenniappan, P., Ramalingam, K., Pazhanivelan, S., & Kaliaperumal, R. (2022). Smart farming: Internet of Things (IoT)-based sustainable agriculture. Agriculture, 12(10), 1745.
[11]. Dawn, N., Ghosh, T., Ghosh, S., Saha, A., Mukherjee, P., Sarkar, S., ... & Sanyal, T. (2023). Implementation of Artificial Intelligence, Machine Learning, and Internet of Things (IoT) in revolutionizing Agriculture: A review on recent trends and challenges. Int. J. Exp. Res. Rev, 30, 190- 218.
[12]. Hasan, M. M., Islam, M. U., & Sadeq, M. J. (2022). Towards technological adaptation of advanced farming through AI, IoT, and Robotics: A Comprehensive overview. arXiv preprint arXiv:2202.10459.
[13]. Mesías-Ruiz, G. A., Pérez-Ortiz, M., Dorado, J., De Castro, A. I., & Peña, J. M. (2023). Boosting precision crop protection towards agriculture 5.0 via machine learning and emerging technologies: A contextual review. Frontiers in Plant Science, 14, 1143326.
[14]. Shahab, H., Iqbal, M., Sohaib, A., Khan, F. U., & Waqas, M. (2024). IoT-based agriculture management techniques for sustainable farming: A comprehensive review. Computers and Electronics in Agriculture, 220, 108851.
[15]. Ali, A., Hussain, T., Tantashutikun, N., Hussain, N., & Cocetta, G. (2023). Application of smart techniques, internet of things and data mining for resource use efficient and sustainable crop production. Agriculture, 13(2), 397.
[16]. Javaid, M., Haleem, A., Khan, I. H., & Suman, R. (2023). Understanding the potential applications of Artificial Intelligence in Agriculture Sector. Advanced Agrochem, 2(1), 15-30.
[17]. Catota, P., Minaya, C., Acurio, J. A. G., Andrade, E. D. A., & Rosero, R. Sustainability of precision agriculture as a proposal for the development of autonomous crops using IoT. management, 10, 11.
[18]. Riskiawan, H. Y., Gupta, N., Setyohadi, D. P. S., Anwar, S., Kurniasari, A. A., Hariono, B., ... & Basori, A. H. (2024). Artificial Intelligence Enabled Smart Monitoring and Controlling of IoT-Green House. Arabian Journal for Science and Engineering, 49(3), 3043-3061.
[19]. Parasuraman, K., Anandan, U., & Anbarasan, A. (2021, February). IoT based smart agriculture automation in artificial intelligence. In 2021 Third International Conference on Intelligent Communication Technologies and Virtual Mobile Networks (ICICV) (pp. 420-427). IEEE.
[20]. Sheron, P. F., Sridhar, K. P., Baskar, S., & Shakeel, P. M. (2021). Projection-dependent input processing for 3D object recognition in human robot interaction systems. Image and Vision Computing, 106, 104089.
[21]. https://www.kaggle.com/datasets/vinayn2/crop-data-of-the-indian-states